民品百貨
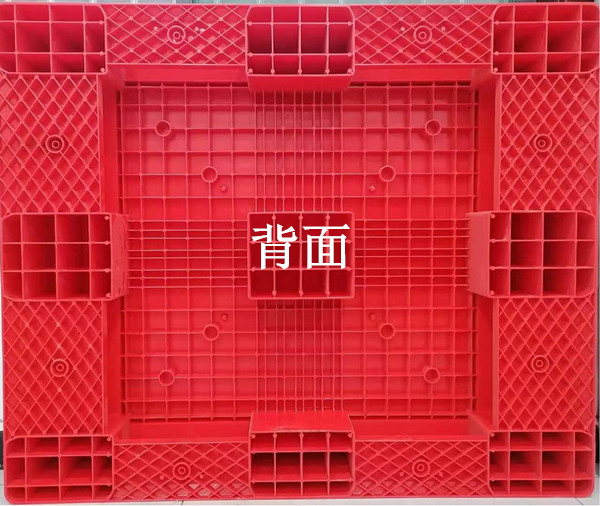
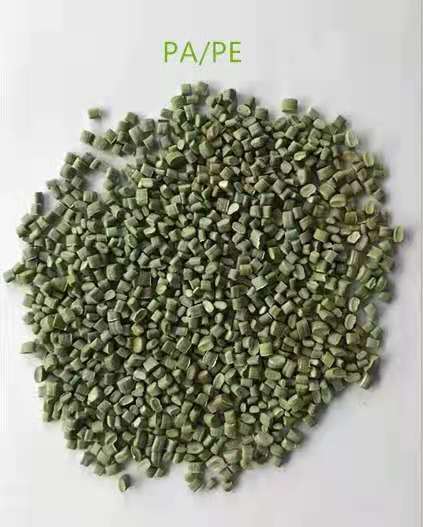
陜西日昇達(dá)塑業(yè)科技有限公司是一家專注于塑料制品的生產(chǎn)企業(yè)�����,始建于2020年,現(xiàn)占地100畝����,高標(biāo)準(zhǔn)廠房3萬平方米,德國慕尼黑工業(yè)大學(xué)研發(fā)團隊���,通過了ISO9001:2000質(zhì)量管理體系認(rèn) 證����。專注再生顆粒料改性��,您提出再生顆粒料技術(shù)指標(biāo)需求�����,我們?yōu)槟峁悠?�;貨?*�,性能穩(wěn)定保障�����,常年銷售再生顆粒料����。公司秉承“以質(zhì)量...
查看詳情









 當(dāng)前位置:
當(dāng)前位置:

 熱門推薦
熱門推薦



